Delta Force Mini Sumo Robot
September 2001

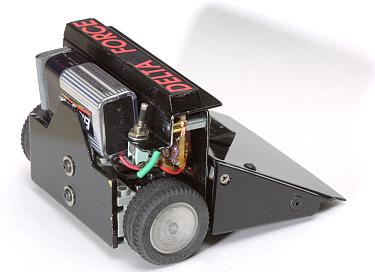
Delta Force is the second robot I designed to compete in autonomous mini sumo contests. I originally intended to build a simple wedge bot target drone to aid in developing defense strategies for my other sumo bot ROBOR. It worked much better than I thought. It beats ROBOR in every match except ones contrived to put Delta Force at a severe disadvantage.
Delta force took about three weeks to build. I reused most of the programming code from ROBOR. If you want to see schematics and source code click here to download a zip file. The schematics are large gif images suitable for printing.
|
News Feb. 15 2003: Delta Force wins AHRC 2003 Robot Rally Mini Sumo contest for the second time and remains undefeated. This year I replaced the 2 AAA batteries with a 9 volt battery. This increased the motor voltage from 12 to 18. Delta force is almost 50% faster than it was last year and had no trouble defeating it's opponents. |
|
Feb. 9 2002: Delta Force wins AHRC 2002 Robot Rally Mini Sumo contest and remains undefeated. Click here for pictures. Delta Force has some additional features not present when this page was originally published. I added 2 AAA batteries to increase the power supply to 12 volts and added a drop-down false white line on the rear to help prevent rear end attacks. There is also a rubber brake pad on the bottom rear to prevent being pushed backward when the front end is lifted. |
| Data Sheet | |
|---|---|
| Size | 9.9cm(W) x 9.9cm(L) x 6.8cm(H) |
| Weight | 498 grams |
| CPU | PIC16F877-20/SP with 16 MHZ Crystal 8K ROM 368 Byte RAM |
| Programming Language |
C |
| Motors | Two Lego 350 RPM 9 volt gear motors |
| Motor driver chip |
L293D |
| Speed Control | Software generated Pulse Rate Modulaton with Back-EMF feedback. Pulse width is constant. |
| Tires | Two 30.4 mm diameter Lego tires |
| Wheels | Custom made steel |
| Drive system | Direct drive from Lego motor shaft |
| Speed | 36 cm/sec |
| Pushing force | 450 grams (wheels spinning) |
| Power | Two Alkaline 9 volt batterys |
| Motor Current | 60mA crusing, 400 mA pushing |
| Sensors | Two reflective IR sensors for edge detection Custom two channel active IR to locate opponents |
| Telemetry | Connector for external transmitter Linx TXM-418-RM (9600 baud 418 MHZ) |

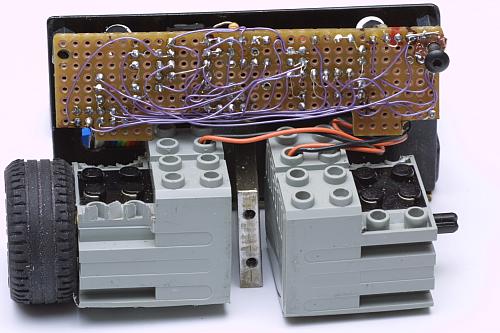
Bottom view.
Rear view.
Active IR sensor board visible.
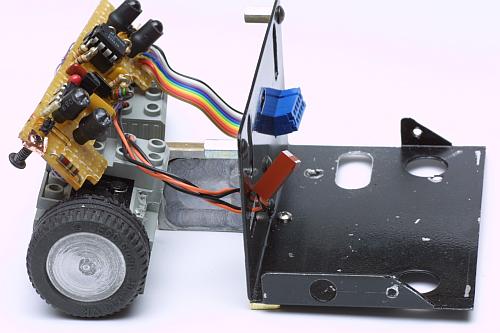
Side view, disassembled.
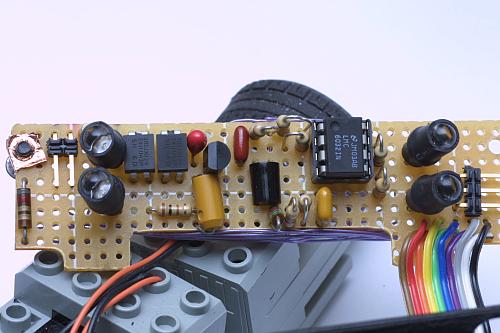
Closeup of the active IR sensor board.
Small black device in center is an IR pin photo diode. Two pairs of high power IR LEDs are on the left and right sides. They are pulsed at 1/2 amp, 500 times per second.
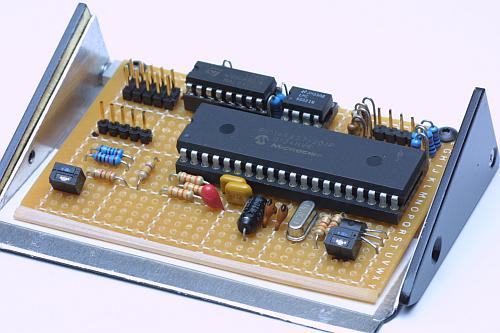
Controller board.

Custom steel wheel, Lego tire, stock Lego wheel
Using steel for the wheel material added 48 grams above the weight using stock lego wheels.
Previous page: Six Channel Sonar
Next page: ROBOR Mini Sumo Robot
